A C++ header only linear algebra math library for embedded device, utilizing C++ meta-programming.
Linear Algebra Embedded System C++
Read More
Realtime colored pointcloud reconstruction on resource constraint platform based on Lidar, cameras and Imu. Won 2023 China IC competition chamiponship.
State Estimation Multisensor Fusion Lidar Image Processing
Read More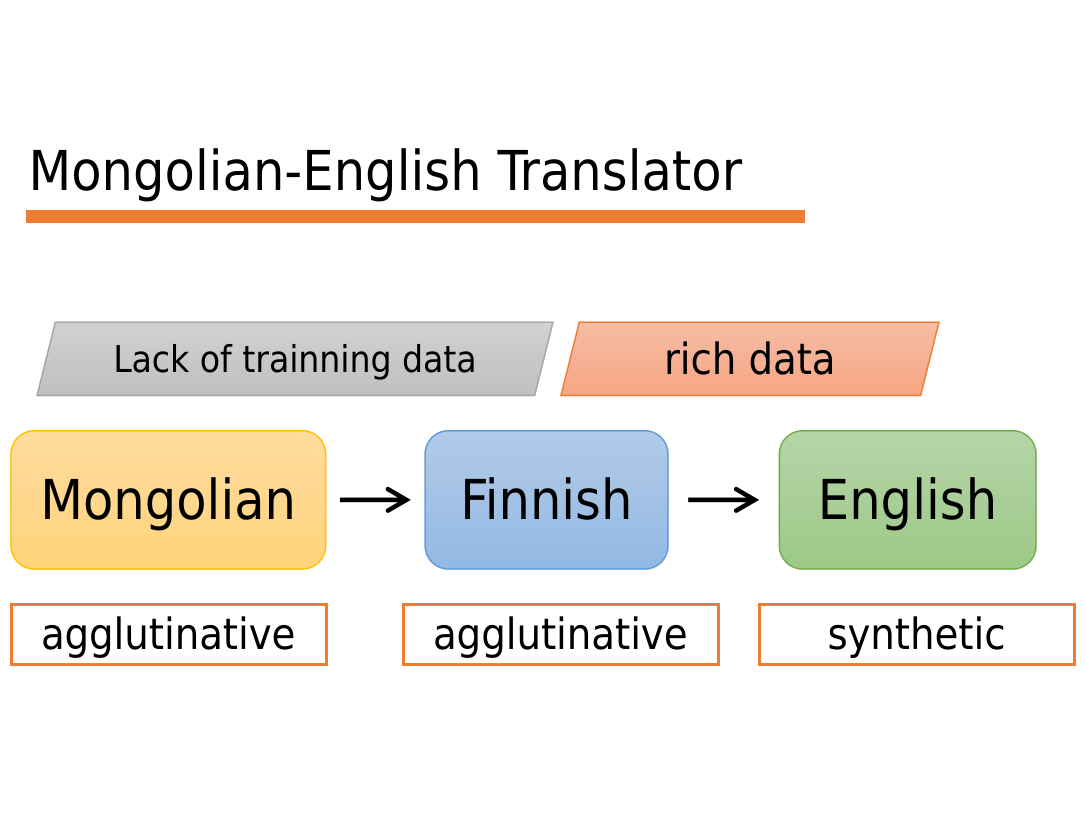
A Mongolian-English translator using Finnish as an intermediate language. Achieived good translation quality with only a small amount of training data.
NLP Word2Vec Transformer
Read More01 Mar 2025
三维空间中的几何描述 无人机在三维空间中的运动可以看作一个6DoF的刚体运动. 本文将从基础出发介绍三维空间中的平移和旋转. 三维欧氏空间中的平移 可以用一个三维欧氏空间$\mathbb{R}^3$来表示机体所在空间. 自然地, 机体的位置可以由向量 $p\in \mathbb{R}^3$ 表示. 机体在空间中的位移可以由向量的加法表示. \[p_2=p_1+d\] 其中$d\in \mathbb{R}^3$. 显然, 这是一个线性变换, 也可以用向量线性变换的形式表出. \[p_2=Ap_1\] 其中$A$可以由线性方程组$(A-I)p_1=d$ 解出. 我们称矩阵$A$为一个平移变换. 旋转的定义 旋转的表示并不像位移的表示那样容易. 抽象来讲, 旋转和位移都是和三维空间中质点一样, 有独立数学表示的概念. 但由于三维欧氏空间的良好特性, 可以很直观地将平移也表示在三维欧氏空间中, 也就是$d\in \mathbb{R}^3$. 如果将旋转和平移都看作一种变换, 它们都能使三维空间中的质点位置发生改变. 比如在空间中, 点$p1$旋转到了$p2$. 自然地, 也可以用一个线性变换来表示三维空间中的旋转作用, 记作$R$. \[p_2=Rp_1\] 接下来, 进一步描述$R$....
Linear Algebra Rigid Body Transformation For Beginner
17 Feb 2025
## $P_{n}$ can be decomposed into such form [P_{n}=U_{n}\Lambda_{n}U_{n}^T,] where $\Lambda_{n}$ is a diagonal matrix $U_{n}$ is an orthonormal matrix which satsifies [U_{n} = \begin{bmatrix} g^{‘}, & g^{‘’}, & g \end{bmatrix}, g^{T}g^{‘}=0, g^{T}g^{‘’}=0, g^{T}g=1] Using Woodbury Matrix Identity, the correction...
State Estimation Inertial Measurement Unit(IMU) Error State Kalman Filter(ESKF)
14 Feb 2025
Implementation Details of Matrix Decomposition 1. LUP Decomposition We take column major partial pivoting LU decomposition. Since the matrix data are stored in column major order, we swap the columns in the matrix data directly. 1. Partial Pivoting We use...
Linear Algebra Scientific Computing C++
